
Edge, Cloud, and Vehicle-based Cooperative Prediction (CPd) System
Published:
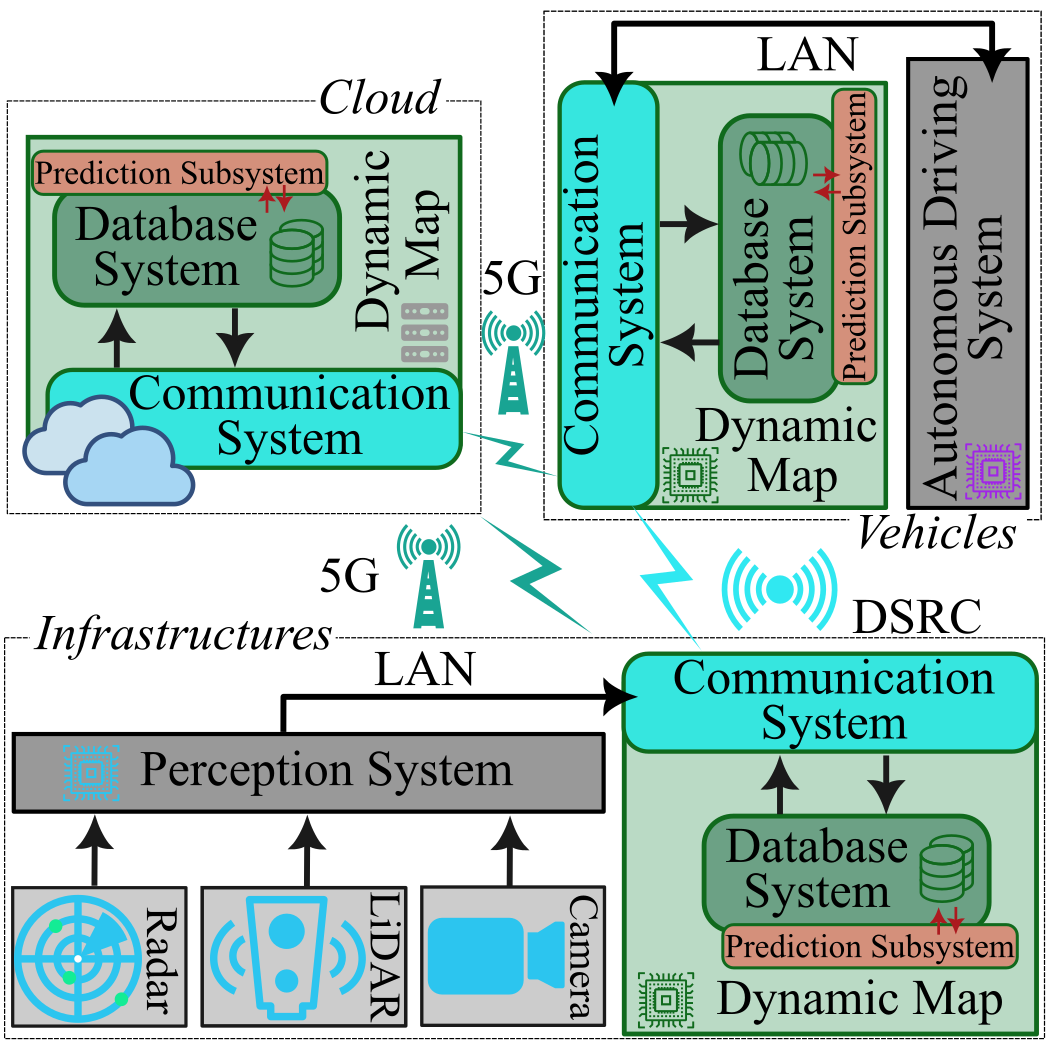
We propose a CPd (Cooperative Prediction) framework that seamlessly operates across ECV (edge-cloud-and-vehicle) devices via DMs, endowing AVs (Autonomous Vehicles) with comprehensive situational awareness akin to a “God’s eye view (GEV)”, which transcends limitations of line-of-sight (LoS), Field-of-View (FoV) and range-of-time (RoT). Compared to the classical “Bird’s eye view (BEV)”, GEV offers AVs additional predictive situational awareness. Unlike conventional vehicle-based architectures that aggregate all workloads into vehicles, our ECV CPd system distributes perception, prediction and application tasks respectively to RSUs, the cloud and vehicles.
The system architecture. ![]()
The experimental environments. ![]()

How the system works. ![]()
![]() Click here to watch the full demo: Bilibili, Youtubu
Click here to watch the full demo: Bilibili, Youtubu