
Collision Risk Assessment Service for Connected Vehicles
Published:
We propose a new collision risk assessment (CRA) method where sigma trajectories that include multiple possible trajectories considering multiple aspects of vehicular motion are designed to cope with vehicular uncertainties. Our method is implemented in a novel server-based architecture, which is different from the commonly used vehicle-based controlled CCWSs. The CRA is provided as a service by a cloud server. The proposed method and architecture are validated and evaluated through extensive real-world experiments.
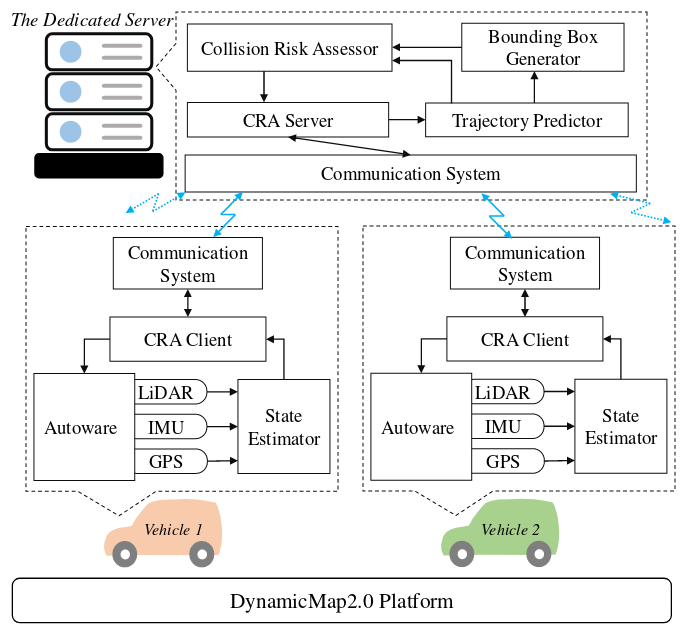
The system architecture. ![]()
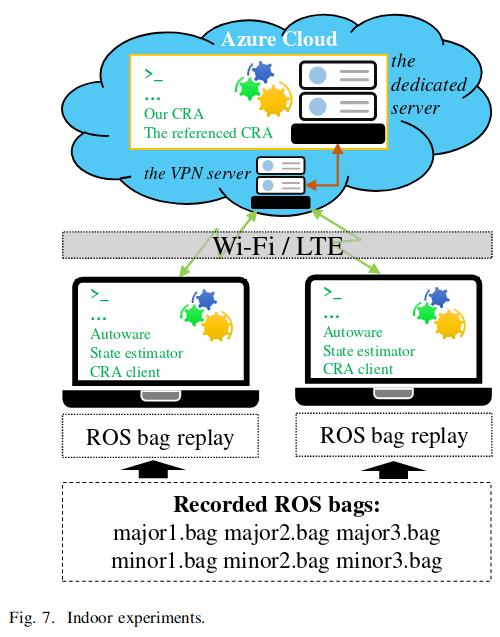
The indoor experiments. ![]()
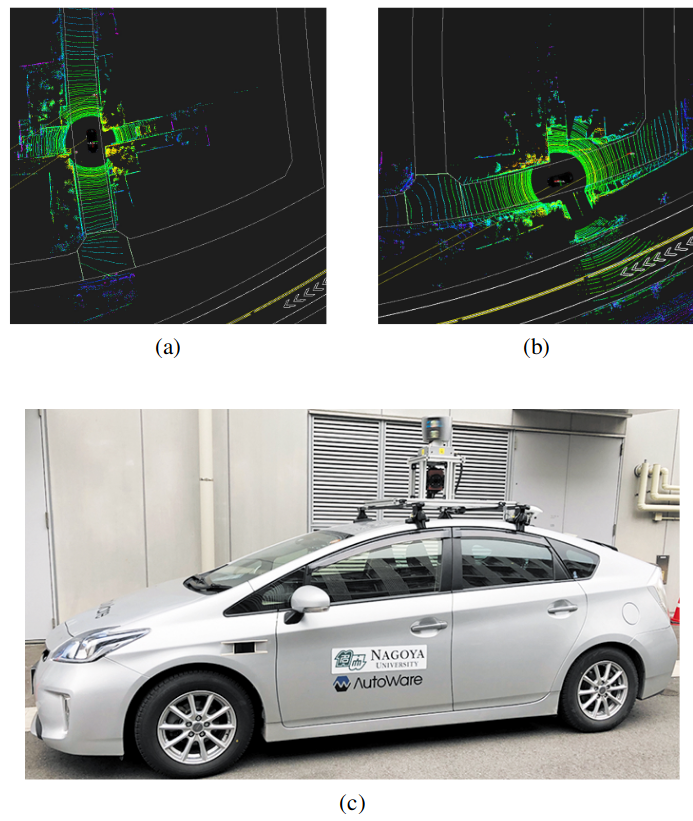
The outdoor experiments. ![]()
How the system works. ![]()